|
Персональные страницы Доп. раздел  |
Коновалов Дмитрий АлександровичПогрешности позиционирования в Дельта-принтереРассмотрены три основных вида погрешностей позиционирования: абсолютные, относительные и динамические. Можно выделить три основных вида погрешностей позиционирования: абсолютные, относительные и динамические.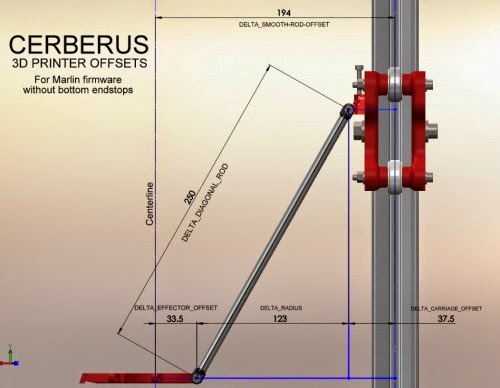 Абсолютные погрешности позиционирования вызваны расхождением идеальной математической модели Дельта-принтера с его реальной геометрией. Абсолютные погрешности позиционирования вызваны расхождением идеальной математической модели Дельта-принтера с его реальной геометрией.Их можно свести к минимуму тщательной юстировкой при сборке (параллельность всех направляющих, перпендикулярность направляющих поверхности стола и т.п.) и точным измерением всех дельта-размеров (см. рисунок слева). Дельта-размеры заносятся в прошивку принтера. На их основе строится математическая модель конкретного экземпляра принтера. Поэтому от их точности зависит величина абсолютной погрешности позиционирования. Относительные погрешности вызваны люфтами в кинематике принтера. Основные из них: люфт кареток относительно направляющих и люфт в шарнирах диагональных рычагов. В настоящее время уже апробированы недорогие конструктивные решения этих узлов, позволяющие свести эти люфты к пренебрежимо малой величине. Это использование в качестве направляющих алюминиевого станочного профиля с V-пазом в паре с каретками на V-роликах и магнитные шарниры: 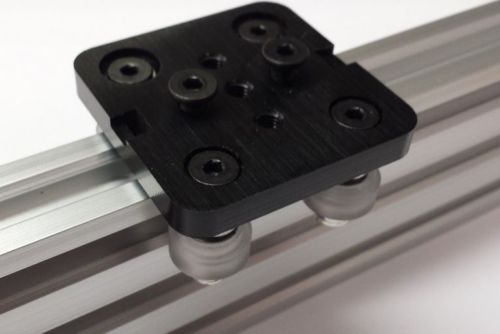  Динамические погрешности проявляются при быстром перемещении печатающей головки на большие расстояния. При этом головка двигается не по прямой, а по дугообразной траектории. Это связано, по-видимому, с несовершенством программного обеспечения, вычисляющего ускорение для каждой каретки независимо от других. Динамические погрешности отсутствуют при медленных перемещениях печатающей головки, во время которых программный механизм ускорения отключен. |
